CADC
This topic describes how to manage the “CADC” dataset.
“CADC” is a fusion dataset with 8 sensors including 7 cameras and 1 lidar
, and has Box3D type of labels on the point cloud data.
(Fig. 11).
See this page for more details about this dataset.
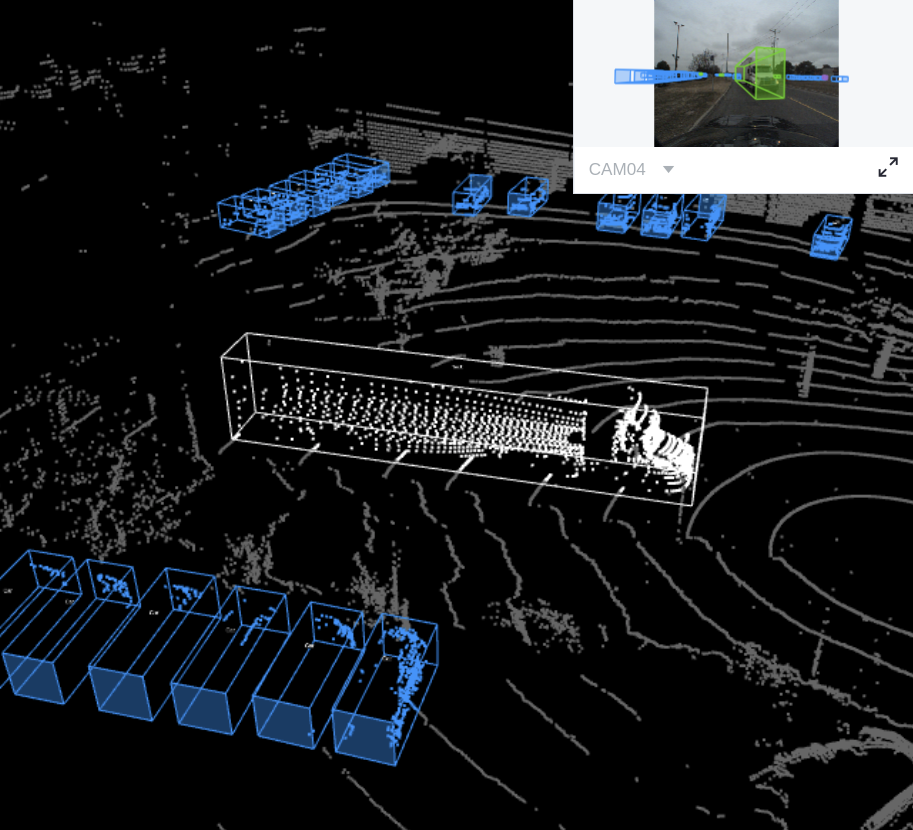
Fig. 11 The preview of a point cloud from “CADC” with Box3D labels.
Create Fusion Dataset
Then, create a fusion dataset client by passing the fusion dataset name and is_fusion argument to the GAS client.
gas.create_dataset("CADC", is_fusion=True)
List Dataset Names
To check if you have created “CADC” fusion dataset, you can list all your available datasets. See this page for details.
The datasets listed here include both datasets and fusion datasets.
gas.list_dataset_names()
Organize Fusion Dataset
Now we describe how to organize the “CADC” fusion dataset by the FusionDataset
instance before uploading it to TensorBay. It takes the following steps to organize “CADC”.
Write the Catalog
The first step is to write the catalog. Catalog is a json file contains all label information of one dataset. See this page for more details. The only annotation type for “CADC” is Box3D, and there are 10 category types and 9 attributes types.
1{
2 "BOX3D": {
3 "isTracking": true,
4 "categories": [
5 { "name": "Animal" },
6 { "name": "Bicycle" },
7 { "name": "Bus" },
8 { "name": "Car" },
9 { "name": "Garbage_Container_on_Wheels" },
10 { "name": "Pedestrian" },
11 { "name": "Pedestrian_With_Object" },
12 { "name": "Traffic_Guidance_Objects" },
13 { "name": "Truck" },
14 { "name": "Horse and Buggy" }
15 ],
16 "attributes": [
17 {
18 "name": "stationary",
19 "type": "boolean"
20 },
21 {
22 "name": "camera_used",
23 "enum": [0, 1, 2, 3, 4, 5, 6, 7, null]
24 },
25 {
26 "name": "state",
27 "enum": ["Moving", "Parked", "Stopped"],
28 "parentCategories": ["Car", "Truck", "Bus", "Bicycle", "Horse_and_Buggy"]
29 },
30 {
31 "name": "truck_type",
32 "enum": [
33 "Construction_Truck",
34 "Emergency_Truck",
35 "Garbage_Truck",
36 "Pickup_Truck",
37 "Semi_Truck",
38 "Snowplow_Truck"
39 ],
40 "parentCategories": ["Truck"]
41 },
42 {
43 "name": "bus_type",
44 "enum": ["Coach_Bus", "Transit_Bus", "Standard_School_Bus", "Van_School_Bus"],
45 "parentCategories": ["Bus"]
46 },
47 {
48 "name": "age",
49 "enum": ["Adult", "Child"],
50 "parentCategories": ["Pedestrian", "Pedestrian_With_Object"]
51 },
52 {
53 "name": "traffic_guidance_type",
54 "enum": ["Permanent", "Moveable"],
55 "parentCategories": ["Traffic_Guidance_Objects"]
56 },
57 {
58 "name": "rider_state",
59 "enum": ["With_Rider", "Without_Rider"],
60 "parentCategories": ["Bicycle"]
61 },
62 {
63 "name": "points_count",
64 "type": "integer",
65 "minimum": 0
66 }
67 ]
68 }
69}
Note
The annotations for “CADC” have tracking information, hence the value of isTracking should be set as True.
Write the Dataloader
The second step is to write the dataloader.
The dataloader function of “CADC” is to manage all the files and annotations of “CADC” into a
FusionDataset instance.
The code block below displays the “CADC” dataloader.
1#!/usr/bin/env python3
2#
3# Copyright 2021 Graviti. Licensed under MIT License.
4#
5# pylint: disable=invalid-name
6# pylint: disable=missing-module-docstring
7
8import json
9import os
10from datetime import datetime
11from typing import Any, Dict, List
12
13import quaternion
14
15from tensorbay.dataset import Data, Frame, FusionDataset
16from tensorbay.exception import ModuleImportError
17from tensorbay.label import LabeledBox3D
18from tensorbay.opendataset._utility import glob
19from tensorbay.sensor import Camera, Lidar, Sensors
20
21DATASET_NAME = "CADC"
22
23
24def CADC(path: str) -> FusionDataset:
25 """`CADC <http://cadcd.uwaterloo.ca/index.html>`_ dataset.
26
27 The file structure should be like::
28
29 <path>
30 2018_03_06/
31 0001/
32 3d_ann.json
33 labeled/
34 image_00/
35 data/
36 0000000000.png
37 0000000001.png
38 ...
39 timestamps.txt
40 ...
41 image_07/
42 data/
43 timestamps.txt
44 lidar_points/
45 data/
46 timestamps.txt
47 novatel/
48 data/
49 dataformat.txt
50 timestamps.txt
51 ...
52 0018/
53 calib/
54 00.yaml
55 01.yaml
56 02.yaml
57 03.yaml
58 04.yaml
59 05.yaml
60 06.yaml
61 07.yaml
62 extrinsics.yaml
63 README.txt
64 2018_03_07/
65 2019_02_27/
66
67 Arguments:
68 path: The root directory of the dataset.
69
70 Returns:
71 Loaded `~tensorbay.dataset.dataset.FusionDataset` instance.
72
73 """
74 root_path = os.path.abspath(os.path.expanduser(path))
75
76 dataset = FusionDataset(DATASET_NAME)
77 dataset.notes.is_continuous = True
78 dataset.load_catalog(os.path.join(os.path.dirname(__file__), "catalog.json"))
79
80 for date in os.listdir(root_path):
81 date_path = os.path.join(root_path, date)
82 sensors = _load_sensors(os.path.join(date_path, "calib"))
83 for index in os.listdir(date_path):
84 if index == "calib":
85 continue
86
87 segment = dataset.create_segment(f"{date}-{index}")
88 segment.sensors = sensors
89 segment_path = os.path.join(root_path, date, index)
90 data_path = os.path.join(segment_path, "labeled")
91
92 with open(os.path.join(segment_path, "3d_ann.json"), "r", encoding="utf-8") as fp:
93 # The first line of the json file is the json body.
94 annotations = json.loads(fp.readline())
95 timestamps = _load_timestamps(sensors, data_path)
96 for frame_index, annotation in enumerate(annotations):
97 segment.append(_load_frame(sensors, data_path, frame_index, annotation, timestamps))
98
99 return dataset
100
101
102def _load_timestamps(sensors: Sensors, data_path: str) -> Dict[str, List[str]]:
103 timestamps = {}
104 for sensor_name in sensors.keys():
105 data_folder = f"image_{sensor_name[-2:]}" if sensor_name != "LIDAR" else "lidar_points"
106 timestamp_file = os.path.join(data_path, data_folder, "timestamps.txt")
107 with open(timestamp_file, "r", encoding="utf-8") as fp:
108 timestamps[sensor_name] = fp.readlines()
109
110 return timestamps
111
112
113def _load_frame(
114 sensors: Sensors,
115 data_path: str,
116 frame_index: int,
117 annotation: Dict[str, Any],
118 timestamps: Dict[str, List[str]],
119) -> Frame:
120 frame = Frame()
121 for sensor_name in sensors.keys():
122 # The data file name is a string of length 10 with each digit being a number:
123 # 0000000000.jpg
124 # 0000000001.bin
125 data_file_name = f"{frame_index:010}"
126
127 # Each line of the timestamps file looks like:
128 # 2018-03-06 15:02:33.000000000
129 timestamp = datetime.strptime(
130 timestamps[sensor_name][frame_index][:23], "%Y-%m-%d %H:%M:%S.%f"
131 ).timestamp()
132 if sensor_name != "LIDAR":
133 # The image folder corresponds to different cameras, whose name is likes "CAM00".
134 # The image folder looks like "image_00".
135 camera_folder = f"image_{sensor_name[-2:]}"
136 image_file = f"{data_file_name}.png"
137
138 data = Data(
139 os.path.join(data_path, camera_folder, "data", image_file),
140 target_remote_path=f"{camera_folder}-{image_file}",
141 timestamp=timestamp,
142 )
143 else:
144 data = Data(
145 os.path.join(data_path, "lidar_points", "data", f"{data_file_name}.bin"),
146 timestamp=timestamp,
147 )
148 data.label.box3d = _load_labels(annotation["cuboids"])
149
150 frame[sensor_name] = data
151 return frame
152
153
154def _load_labels(boxes: List[Dict[str, Any]]) -> List[LabeledBox3D]:
155 labels = []
156 for box in boxes:
157 dimension = box["dimensions"]
158 position = box["position"]
159
160 attributes = box["attributes"]
161 attributes["stationary"] = box["stationary"]
162 attributes["camera_used"] = box["camera_used"]
163 attributes["points_count"] = box["points_count"]
164
165 label = LabeledBox3D(
166 size=(
167 dimension["y"], # The "y" dimension is the width from front to back.
168 dimension["x"], # The "x" dimension is the width from left to right.
169 dimension["z"],
170 ),
171 translation=(
172 position["x"], # "x" axis points to the forward facing direction of the object.
173 position["y"], # "y" axis points to the left direction of the object.
174 position["z"],
175 ),
176 rotation=quaternion.from_rotation_vector((0, 0, box["yaw"])),
177 category=box["label"],
178 attributes=attributes,
179 instance=box["uuid"],
180 )
181 labels.append(label)
182
183 return labels
184
185
186def _load_sensors(calib_path: str) -> Sensors:
187 try:
188 import yaml # pylint: disable=import-outside-toplevel
189 except ModuleNotFoundError as error:
190 raise ModuleImportError(module_name=error.name, package_name="pyyaml") from error
191
192 sensors = Sensors()
193
194 lidar = Lidar("LIDAR")
195 lidar.set_extrinsics()
196 sensors.add(lidar)
197
198 with open(os.path.join(calib_path, "extrinsics.yaml"), "r", encoding="utf-8") as fp:
199 extrinsics = yaml.load(fp, Loader=yaml.FullLoader)
200
201 for camera_calibration_file in glob(os.path.join(calib_path, "[0-9]*.yaml")):
202 with open(camera_calibration_file, "r", encoding="utf-8") as fp:
203 camera_calibration = yaml.load(fp, Loader=yaml.FullLoader)
204
205 # camera_calibration_file looks like:
206 # /path-to-CADC/2018_03_06/calib/00.yaml
207 camera_name = f"CAM{os.path.splitext(os.path.basename(camera_calibration_file))[0]}"
208 camera = Camera(camera_name)
209 camera.description = camera_calibration["camera_name"]
210
211 camera.set_extrinsics(matrix=extrinsics[f"T_LIDAR_{camera_name}"])
212
213 camera_matrix = camera_calibration["camera_matrix"]["data"]
214 camera.set_camera_matrix(matrix=[camera_matrix[:3], camera_matrix[3:6], camera_matrix[6:9]])
215
216 distortion = camera_calibration["distortion_coefficients"]["data"]
217 camera.set_distortion_coefficients(**dict(zip(("k1", "k2", "p1", "p2", "k3"), distortion)))
218
219 sensors.add(camera)
220 return sensors
create a fusion dataset
To load a fusion dataset, we first need to create an instance of FusionDataset.(L75)
Note that after creating the fusion dataset,
you need to set the is_continuous attribute of notes to True,(L76)
since the frames
in each fusion segment is time-continuous.
load the catalog
Same as dataset, you also need to load the catalog.(L77) The catalog file “catalog.json” is in the same directory with dataloader file.
create fusion segments
In this example, we create fusion segments by dataset.create_segment(SEGMENT_NAME).(L86)
We manage the data under the subfolder(L33) of the date folder(L32) into a fusion segment
and combine two folder names to form a segment name,
which is to ensure that frames in each segment are continuous.
add sensors to fusion segments
After constructing the fusion segment, the sensors corresponding to different data should be added to the fusion segment.(L87)
In “CADC” , there is a need for projection, so we need not only the name for each sensor, but also the calibration parameters.
And to manage all the Sensors (L81, L183) corresponding to different data,
the parameters from calibration files are extracted.
Lidar sensor only has extrinsics,
here we regard the lidar as the origin of the point cloud 3D coordinate system, and set the extrinsics as defaults(L189).
To keep the projection relationship between sensors,
we set the transform from the camera 3D coordinate system to the lidar 3D coordinate system
as Camera extrinsics(L205).
Besides extrinsics(),
Camera sensor also has intrinsics(),
which are used to project 3D points to 2D pixels.
The intrinsics consist of two parts,
CameraMatrix and DistortionCoefficients.(L208-L211)
add frames to segment
After adding the sensors to the fusion segments, the frames should be added into the continuous segment in order(L96).
Each frame contains the data corresponding to each sensor, and each data should be added to the frame under the key of sensor name(L147).
In fusion datasets, it is common that not all data have labels. In “CADC”, only point cloud files(Lidar data) have Box3D type of labels(L145). See this page for more details about Box3D annotation details.
Note
The CADC dataloader above uses relative import(L16-L19). However, when you write your own dataloader you should use regular import. And when you want to contribute your own dataloader, remember to use relative import.
Visualize Dataset
Optionally, the organized dataset can be visualized by Pharos, which is a TensorBay SDK plug-in. This step can help users to check whether the dataset is correctly organized. Please see Visualization for more details.
Upload Fusion Dataset
After you finish the dataloader and organize the “CADC” into a
FusionDataset instance, you can upload it
to TensorBay for sharing, reuse, etc.
# fusion_dataset is the one you initialized in "Organize Fusion Dataset" section
fusion_dataset_client = gas.upload_dataset(fusion_dataset, jobs=8)
fusion_dataset_client.commit("initial commit")
Remember to execute the commit step after uploading. If needed, you can re-upload and commit again. Please see this page for more details about version control.
Note
Commit operation can also be done on our GAS Platform.
Read Fusion Dataset
Now you can read “CADC” dataset from TensorBay.
fusion_dataset = FusionDataset("CADC", gas)
In dataset “CADC”, there are lots of
FusionSegments: 2018_03_06/0001, 2018_03_07/0001, …
You can get the segment names by list them all.
fusion_dataset.keys()
You can get a segment by passing the required segment name.
fusion_segment = fusion_dataset["2018_03_06/0001"]
Note
If the segment or fusion segment is created without given name, then its name will be “”.
In the 2018_03_06/0001 fusion segment,
there are several sensors.
You can get all the sensors by accessing the sensors
of the FusionSegment.
sensors = fusion_segment.sensors
In each fusion segment, there are a sequence of frames. You can get one by index.
frame = fusion_segment[0]
In each frame, there are several data corresponding to different sensors. You can get each data by the corresponding sensor name.
for sensor_name in sensors.keys():
data = frame[sensor_name]
In “CADC”, only data
under Lidar
has a sequence of Box3D annotations.
You can get one by index.
lidar_data = frame["LIDAR"]
label_box3d = lidar_data.label.box3d[0]
category = label_box3d.category
attributes = label_box3d.attributes
There is only one label type in “CADC” dataset, which is box3d.
The information stored in category is
one of the category names in “categories” list of catalog.json.
The information stored in attributes
is some of the attributes in “attributes” list of catalog.json.
See this page for more details about the structure of Box3D.
Delete Fusion Dataset
To delete “CADC”, run the following code:
gas.delete_dataset("CADC")